Autonomous Driving
Vector Maps
Sensor Configurations
Generalization
Vector Map Generation for Autonomous Driving
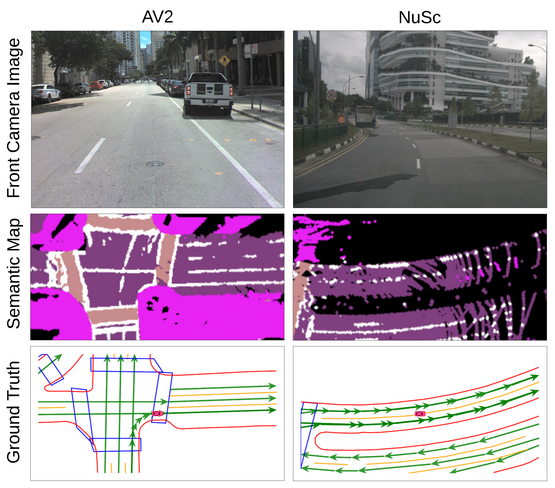
Insights:\nSemVecNet offers a novel approach to building more generalizable and flexible vector maps for autonomous driving applications. By adopting a modular pipeline that incorporates a bird’s-eye view (BEV) semantic map, this technology adapts to different sensor layouts, enhancing its practicality in diverse settings.\n\nKey Points:\n- Probabilistic semantic mapping enables robust performance across different sensor setups.\n- The MapTRv2 decoder transforms BEV maps into precise vector formats, enhancing map accuracy.\n- This method shows superior generalization capabilities compared to traditional approaches, promising more adaptable solutions for the dynamic needs of autonomous driving.\n\nPotential:\nSemVecNet could reshape how vector maps are generated, offering greater adaptability and reduced retraining costs, crucial for rolling out autonomous vehicles across varied terrains and conditions.
Personalized AI news from scientific papers.