Depth Estimation
Contrastive Learning
Diffusion Models
Robust Depth Estimation with Diffusion Models
Digging into contrastive learning for robust depth estimation with diffusion models presents D4RD, a technique that integrates knowledge distillation into contrastive learning for diffusion models to strengthen depth estimation under adverse conditions. Highlights of this study include:
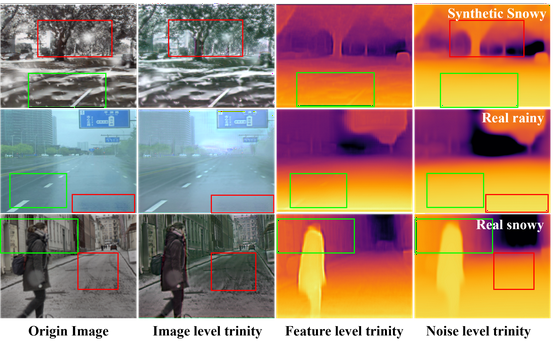
- The introduction of a custom trinity contrastive scheme, aiding noisy predictions toward precise optimum.
- A novel multi-level contrast strategy harnessing both feature and image levels.
- Implementing improvements to the baseline model to enhance convergence and outlier prevention.
D4RD’s contribution is vital for autonomous systems, bolstering the reliability of depth estimation in challenging environmental conditions. This research extends the usability of AI in domains like autonomous driving and robotic navigation in the face of weather perturbations.
Personalized AI news from scientific papers.