AI
Embodied AI
Vision-and-Language Navigation
VLM
Robotics
NaVid: Next-Gen Vision-and-Language Navigation
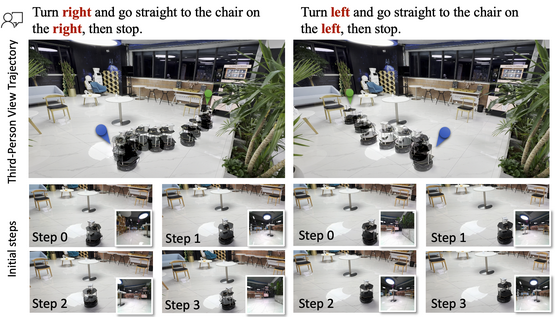
Vision-and-Language Navigation (VLN) is a cutting-edge challenge in embodied AI, where agents navigate through an environment using linguistic instructions. In the latest paper titled ‘NaVid: Video-based VLM Plans the Next Step for Vision-and-Language Navigation’, researchers have developed NaVid, a large vision-language model (VLM) designed to tackle generalization challenges in VLN, such as adapting to unseen environments and bridging the gap between simulated and real-world conditions.
Here’s a breakdown of NaVid’s key features:
- Video-Based: Utilizes a mono-RGB camera instead of static images.
- No Maps Needed: Does not rely on external sensors like odometers or depth inputs.
- Human-Like Navigation: Follows instructions with dynamic video streams.
- Data-Rich Training: Employed 550k samples from VLN-CE trajectories and 665k web data samples.
NaVid’s impressive capabilities have shown state-of-the-art performance in both simulated and real-world environments. It demonstrates a significant step forward in the development of autonomous navigation systems that can effectively follow human instructions and adapt across different data sets and realities. The success of NaVid can lead to enhancements in robotics, autonomous vehicles, and even assistive technologies, paving the way for AI systems that interact with our world in a more intuitive and human-like manner.
Personalized AI news from scientific papers.