Artificial Intelligence
Robotics
Large Language Models
Deadlock Resolution
Prompt Engineering
LLM Deadlock Resolution in Multi-Robot Systems
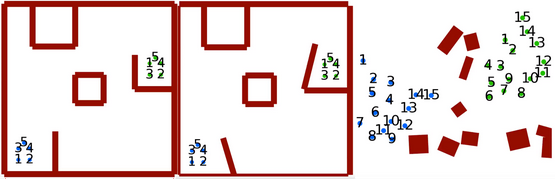
Context: Deadlocks in multi-robot systems pose significant challenges, often requiring high-level interventions. LLMs, through articulate prompting, can provide impactful solutions.
Summary:
- Developed a hierarchical control framework where LLM identifies a leader robot and direction to break deadlocks.
- Utilized graph neural network (GNN) for executing the LLM-devised plan.
- Experimented with various prompting techniques for enhancing the LLM’s performance in complex environments.
Opinion: The application of LLMs in robotic deadlocks is promising, offering a cost-effective and scalable solution. With their ability to generalize and require minimal data, LLMs could potentially revolutionize high-level planning in not just robotics but various domains where strategic deadlock resolution is key. This approach’s success highlights the intersection of language models and practical, real-world applications.
Personalized AI news from scientific papers.