Autonomous Driving
Trajectory Sampling
VQ-VAE
Self-Supervised Learning
Learning Sampling Distributions for Autonomous Driving
Researchers in Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization propose an advanced method for trajectory design in autonomous driving. By implementing vector quantized variational autoencoder (VQ-VAE) and a differentiable optimization-based safety filter, this method captures multi-modal sampling distributions effectively.
- The VQ-VAE learns from optimal trajectory demonstration data.
- A safety filter corrects sampled trajectories for collision avoidance.
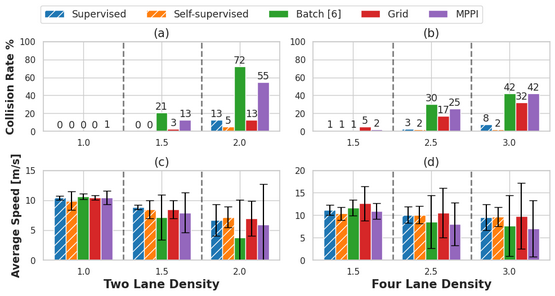
- The method outperforms state-of-the-art CVAE-based solutions.
- Reduces collisions in simulations by up to 12 times while maintaining competitive driving speeds.
The significance of this paper lies in its potential to enhance autonomous driving systems, leading to safer and more efficient traffic management. It demonstrates an innovative approach to integrate learning-based methods with generative models, offering a glimpse into improved safety mechanisms for future autonomous vehicles.
Personalized AI news from scientific papers.