Large Language Models
Robotics
Multimodality
GPT-4V
Embodied AI
Large Language Models for Robotics: Opportunities, Challenges, and Perspectives
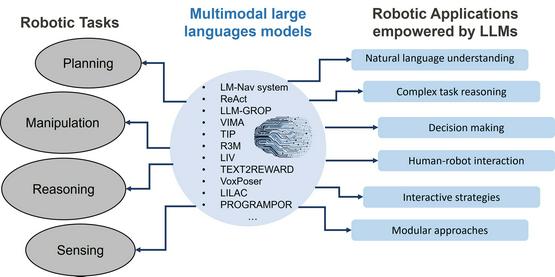
The recent paper titled Large Language Models for Robotics: Opportunities, Challenges, and Perspectives presents a comprehensive study highlighting the integration of LLMs in robotics. It outlines the potential of these models in robot task planning through advanced reasoning and language comprehension capabilities. The paper proposes a framework using multimodal GPT-4V, combining language instructions with visual perceptions to improve the execution of embodied tasks by robots.
- LLMs expand in various domains.
- Multimodal LLMs are linked with precise action plans for robots.
- Text-only LLMs struggle with embodied tasks due to compatibility issues.
- GPT-4V enhances robot performance for complex interactions.
The findings suggest that incorporating LLMs can significantly advance robotics, especially when coupled with multimodal approaches like GPT-4V. The paper is an important step for future research, pointing towards more sophisticated and effective Human-Robot-Environment interactions.
Personalized AI news from scientific papers.