HighwayLLM
Autonomous Driving
RL
LLMs
Safe Navigation
HighwayLLM: Decision-Making and Navigation in Highway Driving with RL-Informed Language Model
| Criteria | Details |
|---|---|
| Method | LLM integration with RL and PID |
| Applications | Autonomous driving, highway navigation |
| Results | Safe and collision-free predictions, enhanced interpretability |
| Future Research | Explore real-world implementations, optimize navigation algorithms, enhance safety measures |
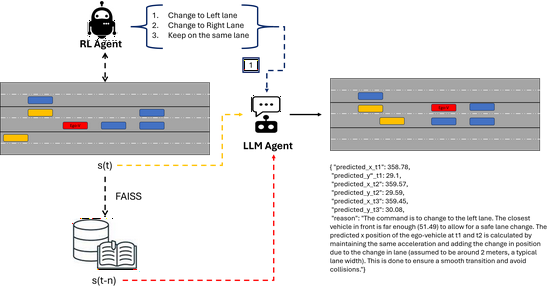
Autonomous driving is a complex task which requires advanced decision making and control algorithms. HighwayLLM harnesses the reasoning capabilities of LLMs to predict the future waypoints for ego-vehicle’s navigation. Our approach also utilizes a pre-trained Reinforcement Learning (RL) model to serve as a high-level planner, making decisions on appropriate meta-level actions. The integration of LLM with RL and PID enhances the decision-making process and provides interpretability for highway autonomous driving. Key points: - HighwayLLM combines LLMs with RL for decision-making - Predicts future waypoints for safe highway driving - Enhances interpretability and safety of autonomous vehicles - PID-based controller guides the vehicle effectively. Importance: This paper showcases the effectiveness of combining LLMs with RL for safe and explainable decision-making in autonomous driving, opening avenues for further research in enhancing autonomous systems.
Personalized AI news from scientific papers.