Robotic Ophthalmic Surgery
Shadow-Guided System
Intraocular Surgery
Instrument Precision
Retina Penetration
EyeLS: Shadow-Guided Instrument Landing System for Robotic Eye Surgery
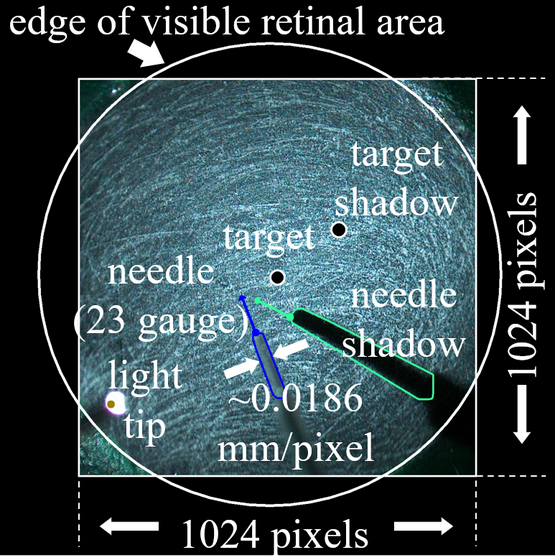
EyeLS: Shadow-Guided Instrument Landing System for Intraocular Target Approaching in Robotic Eye Surgery by Yang et al., takes a leap forward in robotic ophthalmic surgery. This study introduces ‘EyeLS’, a system that leverages the shadow positions of the target and the instrument tip to estimate their relative depth position, allowing the optimization of instrument tip’s insertion trajectory for higher precision in interventions like retina penetration and removal of floating tissues in retinal detachment surgeries.
Key Highlights:
- Proposes a shadow-based depth estimation technique to improve approach accuracy.
- Achieves a 0.0127 mm depth error for floating targets without damaging the retina.
- Showcases successful implementation in a surgical simulator environment.
- Addresses difficulties faced with 2D perspective projection and depth information loss.
- Utilizes intraoperative OCT (iOCT) for final target approaching.
In my opinion, the EyeLS system represents a significant advancement in robotic eye surgery. It cleverly uses a basic principle – the creation of shadows – to circumvent the challenges posed by the loss of depth perception in 2D imaging. Its potential to enhance safety and precision in ocular surgeries makes it an intriguing subject for continued research and development, possibly extending its applications to other forms of delicate microsurgeries.
Personalized AI news from scientific papers.