Diffusion Models
Multi-Task Learning
Neural Rendering
Policy Learning
Diffusion Models for Policy Learning
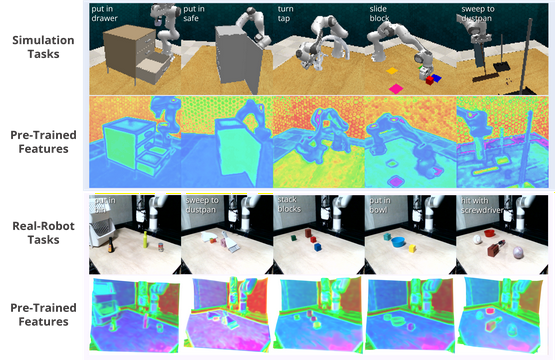
DNAct: Diffusion Guided Multi-Task 3D Policy Learning explores an integrated approach that includes neural rendering and diffusion training for learning a multi-task policy that excels in action sequence spaces.
- Leverages neural rendering to distill 3D semantic features from foundation models like Stable Diffusion.
- Utilizes diffusion training to learn a vision and language feature encapsulating multi-modal task demonstrations.
- Outperforms state-of-the-art NeRF-based approaches by showing a significant increase in success rate.
My opinion: This study illustrates the synergies between various AI disciplines and showcases how they can collectively enhance multi-modal learning frameworks. The success of DNAct in complex robotic tasks is indicative of the vast potential that diffusion and neural rendering technologies hold in advancing AI capabilities.
Personalized AI news from scientific papers.